Labortests des intelligenten Fahrerlosen Transportsystems und der Montage- und Kommissionier-SOLL-Prozesse erfolgreich
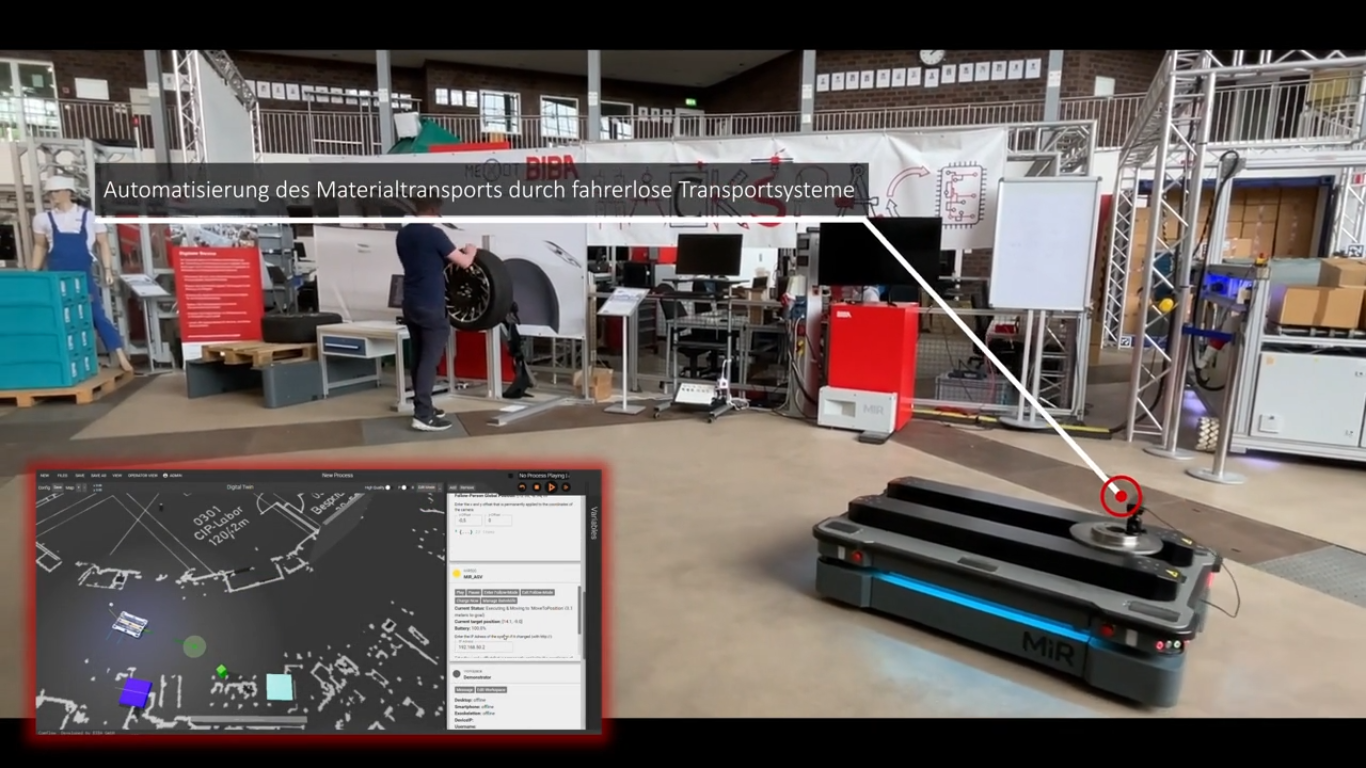
Das Subsystem intelligentes Fahrerloses Transportsystem, inklusive der prozessbezogenen Smartphone-Interaktionsfunktionen, wurde in den Hallen von ELROTEC in Werlte erfolgreich gemeinsam von den Projektpartnern BIBA, ELROTEC und BLG getestet. Hierbei wurde die FTF-integrierten Hubeinheit mit Wiegemodul umgesetzt, sowie die individuell anpassbare Höhe des Hubtisches zur ergonomischen Entlastung implementiert. Es wurden zudem frei…
Kommentare deaktiviert für Labortests des intelligenten Fahrerlosen Transportsystems und der Montage- und Kommissionier-SOLL-Prozesse erfolgreich
14. Februar 2024