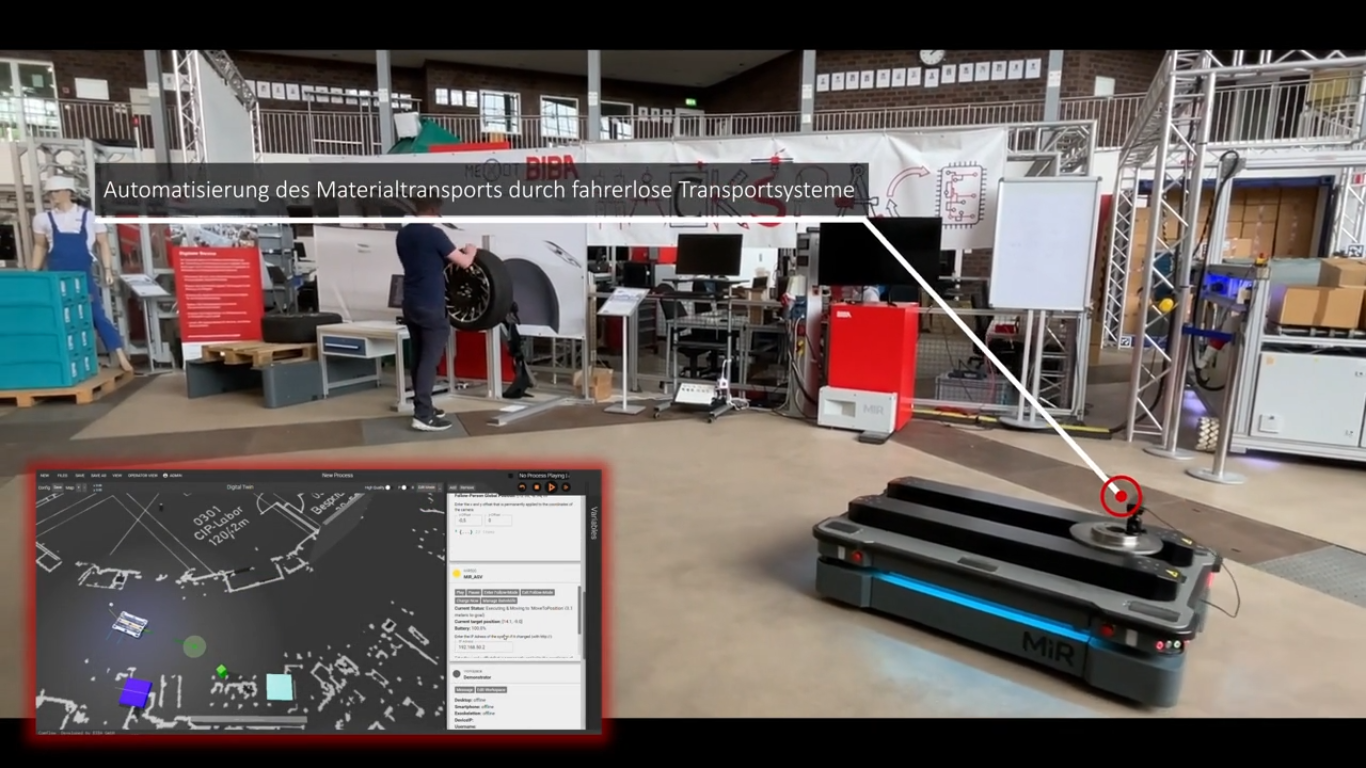
Vor dem Hintergrund einer hohen körperlichen Belastung bei Technikarbeiten im Automobilumschlag arbeitet das BIBA im vom BMDV über das Programm IHATEC geförderten Projekt MEXOT zusammen mit den Partnern BLG LOGISTICS, ELROTEC und HUNIC an einer ergonomischen Ausgestaltung von Arbeitsplätzen bei gleichzeitiger Verbesserung der Prozesseffizienz. Eine Teilkomponente des Gesamtlösungsansatzes stellen Fahrerlose Transportsysteme dar. Um eine intelligente Kommissionierung in Lägern zu ermöglichen, bei denen der Mitarbeitende die benötigten Waren direkt auf Ladungsträger des fahrerlosen Transportsystems kommissioniert, wird im Rahmen des Projektes MEXOT an einem Follow-Me-Modus für Fahrerlose Transportsysteme (FTF) geforscht und entwickelt. Dabei folgt das FTF einem aktiven Mitarbeitenden, welcher den Follow-Me-Modus entweder über Smartwatch- oder Gesten-Interaktion aktiviert. Das Video demonstriert prototypisch die Funktionalität des FTF-Follow-Me-Modus in einem exemplarischen Laborszenario: