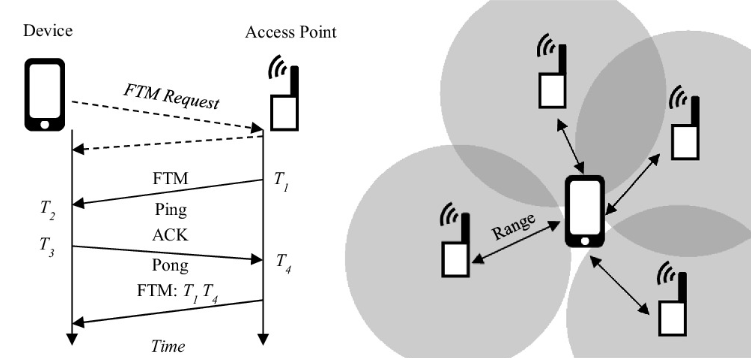
Die Integration von autonomen Transportsystemen oder auch Autonomous Guided Vehicles (AGVs) in intelligente Fabriken revolutioniert die moderne Fertigung und schafft eine Koexistenz zwischen Menschen und robotischen Systemen. In diesem sich entwickelnden Umfeld ist ein kritischer Aspekt die nahtlose Koordination von AGVs und menschlichen Arbeitern innerhalb der Fabriken. Um dies zu erreichen, stellt unsere Forschung ein tragbares Indoor-Lokalisierungssystem vor, das ESP32-Mikrocontroller als kompakte Zugangspunkte nutzt. Mithilfe von Wi-Fi Fine Time Measurement (FTM) und Smartphones schätzt das System die Positionen der Arbeiter durch Multilaterationstechniken in Kombination mit fortschrittlichen Filtermethoden. Dieses Lokalisierungssystem dient als entscheidende Brücke, die sicherstellt, dass AGVs mit den Bewegungen der Arbeiter innerhalb von Lagerhäusern interagieren und darauf reagieren können. Eine Feldstudie in einer tatsächlichen Lagerhausumgebung validiert die Leistung des Systems und zeigt eine Genauigkeit von 1,13 m bei seitlichen Bewegungen. Darüber hinaus demonstrieren seine Lokalisierungsfähigkeiten in spezifischen Lagerhausbereichen das Potenzial zur Verbesserung von Kommissionierprozessen und zur Optimierung der Interaktion zwischen Mensch und AGV.
Die vollständige Zusammenfassung aller Arbeiten ist hier zu finden: https://www.mexot-projekt.de/?page_id=395